Ground texture-based localization for AGVs (MSc. Thesis)
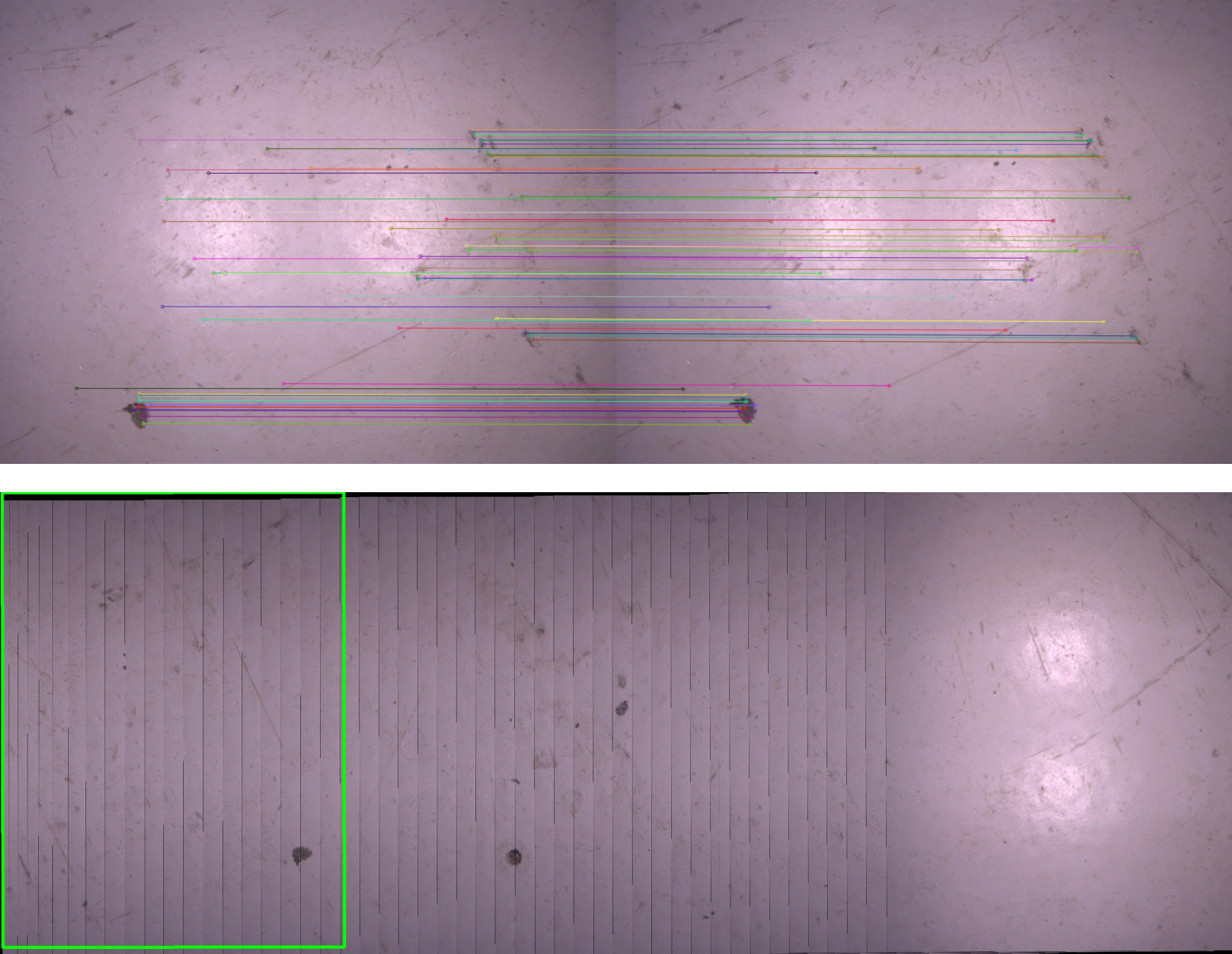 The main objective of my master's thesis as a student at Aalto University was to develop a novel localization system to precisely localize up to millimeter accuracy robots in indoor spaces. The proposed solution was a ground texture-based mapping and localization system that I developed at Bosch Rexroth leveraging the ground-facing camera of the ACTIVE Shuttle.
The main objective of my master's thesis as a student at Aalto University was to develop a novel localization system to precisely localize up to millimeter accuracy robots in indoor spaces. The proposed solution was a ground texture-based mapping and localization system that I developed at Bosch Rexroth leveraging the ground-facing camera of the ACTIVE Shuttle.
Compared to other methods like artificial landmarks (e.g., markers or lines), this approach is advantageous since it does not rely in new infrastructure nor does it need new dedicated sensors and instead leverages what already exists, like the natural textures of the floor.
Note
The results of this work were later published at the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN).

-
Year: 2020
-
Tech: C++, Linux, OpenCV